
Go to documentation repository
Documentation for Axxon One 2.0. Documentation for other versions of Axxon One is available too.
Previous page
![]()
![]() Next page
Next page
| Recommendations |
Attention! Margin of error in determining the speed of vehicles is about 5% with a good calibration, as this function gives only a general idea of the situation. The consumption of resources doesn't change when the Speed detection parameter is enabled. |
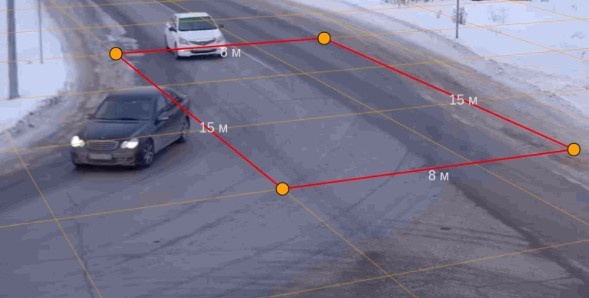
Examples of the corresponding selected area | Lines are parallel to road marking and vehicle bumpers:
|



Overview
Content Tools