
Go to documentation repository
Page History
Aby skonfigurować Rozpoznawanie tablic rejestracyjnych (IV), wykonaj następujące kroki:
- Pobierz i zainstaluj Addon IV LPR ze strony internetowej.
Wyślij Prześlij do wsparcia technicznego adres MAC Serwera, na którym będzie operowało Rozpoznawanie tablic rejestracyjnych (IV), do wsparcia technicznego AxxonSoftnarzędzie detekcji będzie używane.
Note title Uwaga! Narzędzie nie będzie funkcjonować na Serwerze o innym adresie MAC.
- Skopiuj licencję IntelliVision do otrzymaną od wsparcia technicznego do pliku "C:\Program Files\Common Files\AxxonSoft\DetectorPack\IntelliVisionLPRlicense.txt".
Zrestartuj Serwer (zobacz: Zamykanie Serwera, Uruchamianie Serwera).
- Wybierz Utwórz i wybierz obiekt typu typu Rozpoznawanie tablic rejestracyjnych (IV) (1).
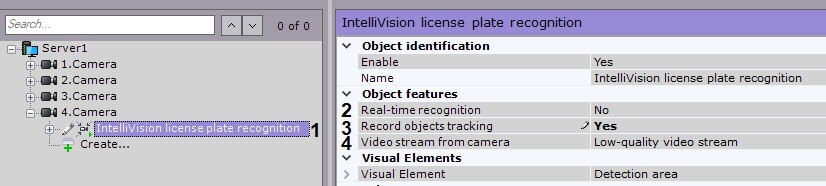

Jeśli niezbędne jest rozpoznawanie tablic rejestracyjnych w czasie rzeczywistym (zobacz: Configuring online Vehicle License Plate recognitionKonfigurowanie Rozpoznawania tablic rejestracyjnych w czasie rzeczywistym), zaznacz Tak dla parametru Rozpoznawanie w czasie rzeczywistym (2).
- Jeśli niezbędny jest Zapis metadanych (3) do bazy metadanych, zaznacz Tak.
- Jeśli kamera wspiera multistreaming, wybierz strumień Strumień wideo z kamery (4), z którego będzie korzystać narzędzie Rozpoznawania tablic rejestracyjnych (IV) (4). Wybranie strumienia wideo o niższej jakości może obniżyć obciążenie Serwera.
Wybierz kraj z listy Algorytm detekcji kierunku poruszania się (1):
Po współrzędnych tablicy rejestracyjnej: jeśli koordynaty tablicy zmierzają od górnej części obrazu do dolnej, pojazd jest rejestrowany jako zbliżający się.
Note title Attention! Różne profile Narzędzia rozpoznawania tablic rejestracyjnych (IV) są zalecane dla Indii, USA, Rosji, Tajwanu, Australii, oraz krajów afrykańskich, różniących się od siebie parametrami rozpoznawania oraz wymaganiami sprzętowymi.
Aby prawidłowo rozpoznawać tablice rejestracyjne ze Stanów Zjednoczonych o wertykalnej orientacji znaków, zalecany jest profil o wyższej dokładności.Info title Informacja Lista wspieranych krajów znajduje się w specyfikacji producenta.
Jeśli koordynaty tablicy zmierzają od dolnej części obrazu do górnej, pojazd jest rozpoznawany jako oddalający się.
Po zmianach skali tablicy rejestracyjnej:

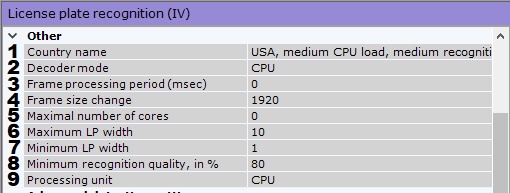
- Wybierz kraj z listy oraz poziom dokładności rozpoznawania w parametrze Nazwa kraju (2)
- Wysokie obciążenie CPU, wysoka jakość - pozwala na osiągnięcie maksymalnej dokładności rozpoznawania, lecz zużywa wiele zasobów CPU i/lub GPU.
- Średnie obciążenie CPU, średnia jakość - pozwala na osiągnięcie wysokiej jakości rozpoznawania przy mniejszym zużyciu zasobów CPU/GPU.
- Niskie obciążenie CPU, niska jakość - pozwala na uzyskanie wyników rozpoznawania tablic szybciej, lecz kosztem ich dokładności.
- Wybierz procesor używany do Wybierz procesor dla dekodowania strumienia wideo przy parametrze Tryb dekodera (3). Jeśli wybierzesz GPU, dedykowana karta graficzna będzie traktowana priorytetowo (przy dekodowaniu przy użyciu chipów NVidia NVDEC). Jeśli nie ma odpowiedniego GPU, dekodowanie będzie się odbywać za pomocą technologii Intel Quick Sync Video. W innym przypadku, do dekodowania używane będzie CPU.
- Wyznacz minimalną ilość milisekund między ramkami podczas rozpoznawania korzystając z parametru Frame processing period (3).
- Analizowane Domyślnie analizowane klatki są skalowane w dół do określonej rozdzielczości (4; 1920 , 1920 pikseli po dłuższej krawędzi obrazu z kameryklatki). Funkcjonuje to następująconastępujące:
Jeśli dłuższa krawędź źródłowego obrazu przekracza wartość wyznaczoną w polu Przeskaluj wszystkie klatki do, jest ona dzielona przez 2.
Jeśli długość krawędzi nie przekracza określonej wartości, przeskalowana klatka będzie używana do celów analizy wideo.
Jeśli długość krawędzi nadal przekracza określoną wartość, jest ona dzielona przez 2 do skutku.
Info title Note Dla przykładu: jeśli rozdzielczość obrazu źródłowego to 2048 * 1536, a limit ustawiony na 1000, obraz zostanie podzielony dwa razy: pierwszy raz z 2048 * 1536 na 1024 * 768, a następnie z 1024 * 768 na 512 * 384; po pierwszym dzieleniu długość dłuższej krawędzi nadal jest większa od ustalonej wartości (1024 > 1000).
- Wyznacz ilość klatek na sekundę, które ma przetwarzać narzędzie detekcji (5). Wartość powinna znajdować się w zakresie [0,016; 100].
- Wyznacz maksymalną ilość rdzeni procesora dostępnych dla narzędzia przy polu Wartość N (5); '0' oznacza wszystkie rdzenie.detekcji. Wartość 0 oznacza, że detektor może korzystać ze wszystkich rdzeni (6)
Wyznacz maksymalną oraz minimalną szerokość tablicy rejestracyjnej pojazdu jako procent pola widzenia kamery (67, 7 8).
- Wyznacz minimalną jakość ANPR przy rozpoznawania tablic rejestracyjnych w polu Minimalna skuteczność jakość rozpoznania tablicy, % % (89). Im wyższa jakość rozpoznawania, tym mniej fałszywych detekcji tablic rejestracyjnych wystąpi. Wartość powinna być zawarta w zakresie [0; 100].
- Domyślnie, narzędzie korzysta jedynie z CPU. Aby korzystać z GPU w celu zwiększenia dokładności rozpoznawania, wybierz Jednostkę przetwarzania (9).
- Wybierz odpowiednio maksymalną oraz minimalną ilość znaków na rozpoznanej tablicy rejestracyjnej odpowiednio w polach maxCharsNum oraz minCharsNum (1, 2).
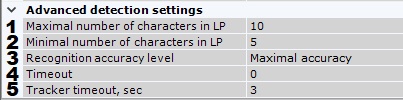
- Wybierz jakość detekcji w polu Poziom dokładności rozpoznawania (3):
Maksymalna skuteczność: maksymalna dokładność rozpoznawania, przy wysokim obciążeniu CPU / GPU.
Wysoka skuteczność: dobra dokładność rozpoznawania by niższym obciążeniu CPU / GPU.
Niska skuteczność: bardzo szybkie rozpoznawanie, przy czym jakość wyników jest niższa.
Określ interwał czasowy między pierwszym rozpoznaniem, a rejestracją zdarzenia w polu Limit czasu (4). Wartość Zero wyznacza czas rejestracji zdarzenia na moment, w którym ścieżka znika z pola widzenia.
Wybierz procesor, z którego ma korzystać narzędzie detekcji - CPU lub jeden z GPU - w polu Jednostka przetwarzania (10, zobacz: Ogólne informacje o konfigurowaniu detekcji).
Note title Uwaga! Uruchomienie algorytmu na NVIDIA GPU może zająć do kilku sekund. Istnieje możliwość korzystania z cache, aby przyspieszyć przyszłe uruchomienia (zobacz: Konfigurowanie akceleracji uruchamiania analityk neuronowych wykorzystujących GPU).
Info title Informacja Jeśli w systemie istnieje kilka GPU, można wyznaczyć konkretny NVIDIA GPU, który będzie wykorzystywany przez narzędzie rozpoznawania tablic rejestracyjnych (IV).
- W polu Czas śledzenia (4) określ maksymalny czas w sekundach między pierwszą klatką, na której tablica rejestracyjna została rozpoznana, a rejestracją zdarzenia. Wartość powinna znajdować się w granicach [0; 3600]. Wartość 0. oznacza, że zdarzenie zostanie zarejestrowane, gdy ścieżka tablicy znajdzie się poza polem widzenia kamery.

- Określ Maksymalną oraz Minimalną liczbę znaków w tablicy (2, 3). Wartość powinna znajdować się w zakresie [1; 20].
W polu Limit czasu (1) wpisz okres w sekundach, po którym ścieżka tablicy rejestracyjnej jest uznawana za utraconą. Wartość powinna znajdować się w zakresie [0; 3600].
W polu Czas śledzenia (s) wpisz czas w sekundach. Jest to czas, po którym rozpoznana tablica będzie rozpoznana ponownie, jeśli nie opuściła pola widzenia kamery (5)Info title Informacja Ten parametr powinien być wykorzystywany w celu wyeliminowania wielokrotnych detekcji jednej tablicy np. w przypadku, gdy tablica rejestracyjna jest przez pewien czas przesłonięta przez inny obiekt, a następnie pojawia się ponownie i jest rozpoznawana raz jeszcze. Jeśli Limit czasu będzie wyższy niż czas przesłonięcia tablicy, powtórzone detekcje będą ignorowane
.
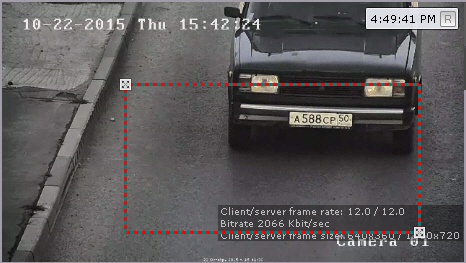
Istnieje możliwość skonfigurowania pola detekcji ANPR w oknie podglądu kamery. Tylko tablice rejestracyjne znajdujące się w strefie będą rozpoznawane. Wielkość strefy może być zmieniana poprzez przeciąganie punktów kotwiczących

 .
. 

Info title Informacja Dla ułatwienia można nacisnąć przycisk
 przycisk
przycisk  i skonfigurować pole detekcji tablic rejestracyjnych na stałym obrazie. Aby anulować zatrzymanie podglądu obrazu, naciśnij przycisk ponownie.
i skonfigurować pole detekcji tablic rejestracyjnych na stałym obrazie. Aby anulować zatrzymanie podglądu obrazu, naciśnij przycisk ponownie.Info title Informacja Pole detekcji jest domyślnie wyświetlone. Naciśnij
 , aby je ukryć. Aby pokazać je ponownie, naciśnij przycisk jeszcze raz.
, aby je ukryć. Aby pokazać je ponownie, naciśnij przycisk jeszcze raz.- Naciśnij Zastosuj
...
Overview
Content Tools