You are viewing an old version of this page. View the current version.
Compare with Current
View Page History
« Previous
Version 4
Next »
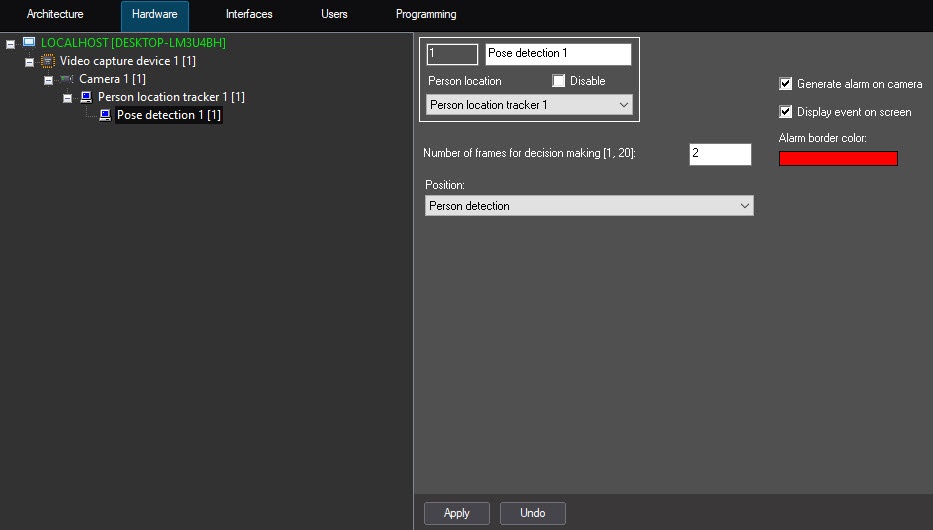
The Pose detection is configured as follows:
- Go to the Pose detection object settings panel, which is created on the basis of the Person location tracker object.
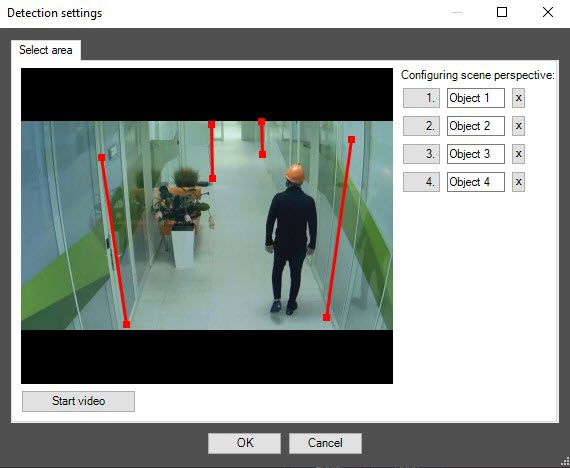
Configure the perspective of the video image:
Click the Settings button (1). As a result, the Detection settings window will open.
Click the Stop video button (1) to capture the video image.
Specify at least three calibration segments in different parts of the frame (2). To create a calibration segment, click and hold the left mouse button on the video image so that you can specify the necessary length size. You can change the size of the already created segments using the anchor points. The calibration segments should be located at different angles to each other depending on the scene and the distortion of the video image.
- Click the OK button (4).
- Set the Generate alarm on camera checkbox (2) if it is also necessary to trigger an alarm on the camera by the specified pose detection.
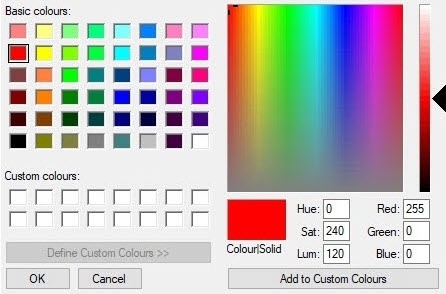
- In the Alarm border color field (3), specify the color of the alarm border using the color palette. The default color is red. Double click the color field to open the Color palette. After selecting the border color, click the OK button to save the settings.
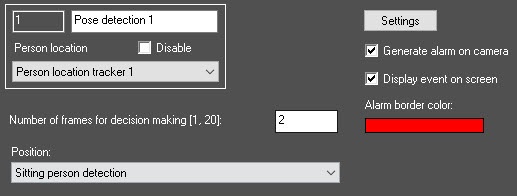
- In the Number of frames for decision making (1-20) field (4), enter the required amount of frames from 1 to 20 on which the human should be found in the specified pose to trigger the corresponding event. The default value is 2.
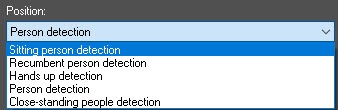
From the Position drop-down list (5), select the human position which is necessary to detect:
Sitting person detection — the detection triggers when a sitting human is found in the frame.
Recumbent person detection — the detection triggers when a recumbent human is found in the frame.
Hands up detection — the detection triggers when a human with hands raised is found in the frame. The hand is considered to be raised if the forearm is parallel to the backbone and the wrists are above the shoulders. If this detection is selected, the following additional settings will become available:

- Working mode — sets the hands position at which the alarm event will be generated.
Person detection — the detection triggers when a human in any pose is found in the frame.
- Close-standing people detection — the detection triggers if the distance between two people is less than specified. If this detection is selected, the following additional settings will become available:
- Calibration column length [0, 3] — sets the length of the calibration segments from 0 to 3 meters, which were set when adjusting the perspective of the video image. The default value is 1.7;
- Distance sensitivity [0, 20] — sets the minimum distance between people from 0 to 20 meters. If the distance between people in the frame is equal to or less than the specified value, then the detection will be triggered. The default value is 2;
- Number of people to alert [0, 20] — sets the number of people who should break the distance for the detection to be triggered. Possible values are from 2 to 20. The default value is 2.
- Click the Apply button (6).
The Pose detection is now configured.
